Project 2: ULNAv2-A
This project is due on Sunday, May 17, at 11:59:59 PM
(Eastern daylight time). You must use submit to
turn in your homework like so:
submit cs411_jtang proj2 proj2.circ proj2.S
Each submitted file must contain your name and assignment
number. For the Logisim file, place that information in a text label
on the main circuit. For the assembly file, place that information
in a comment at the top of the file.
This assignment builds upon the logic components and assembly code from Homework 4, and your C code from Homework 3. Thus, you must have completed those homework assignments before attempting this assignment.
In this assignment, you will finally build the ULNAv2-A processor in Logisim. To test your processor, you will translate a portion of your floating-point multiplier code from Homework 3 into ULNAv2-A.
Part 1: Data Memory
To begin, create a directory for your assignment and download the following files into that directory via wget:
- http://www.csee.umbc.edu/~jtang/cs411.s20/homework/proj2/proj2.S
-
Partial translation
of HW3's
half_float_mult()into ULNAv2-A. You will need to complete the assembly code. - http://www.csee.umbc.edu/~jtang/cs411.s20/homework/proj2/uint16_mult.circ
- Logisim circuit that implements the shift-add multiplier (version 3). You will need this circuit if you are attempting the extra credit.
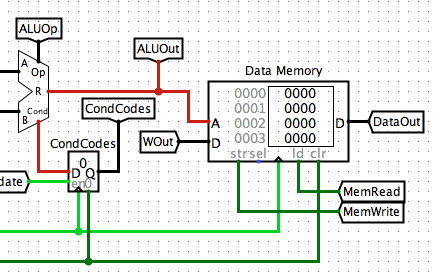
To your Main circuit,
add a Data Memory
(a
RAM device) component, configured with separate load and store
ports. Set the Data Memory's address width to 16 bits, and data
width also to 16 bits. Join its clock line, so that changes to data
memory occur on falling edges. For now, connect the memory's address
line to the ALU output, and input data line to WOut. Add
tunnels from your Decoder's MemRead
and MemWrite control signals to this memory. Add
another tunnel DataOut that will eventually feed back into
the register file.
Part 2: Implement ALU A, B, and W Buses
See the extra credit below before starting this Part. Your work implementations for this and Part 4 will differ if you attempt the extra credit.
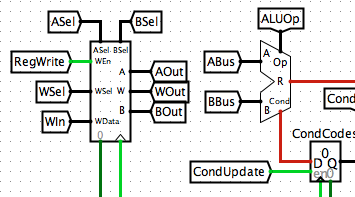
Next, break the connections
between the register file and ALU. Set the ALU's A input to
the tunnel ABus, and likewise set the B input
to BBus.
You then need to add
the logic to set the values going into ABus, BBus,
and WBus. Create three more subcircuits, ABus
Selector, BBus Selector, and WIn
Selector. These subcircuits take control signals from the
Decoder to determine which values to propagate.
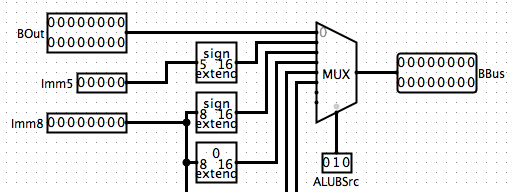
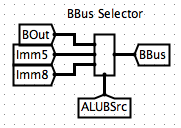
For example, the BBus Selector has within it a mux to
select one of (at least) four values: BOut, Imm5
(sign extended), Imm8 (sign extended), or Imm8
(zero extended). Depending upon your implementation, you may need
additional inputs into the mux.
Likewise, the subcircuit ABus Selector sets ABus using a mux. You will find that AOut is not the only possible value for the ALU's A input.
WIn Selector sets WIn using a mux. The inputs to this mux
are at least ALUOut and DataOut. This mux is
selected by MemToReg, and its output feeds
into WIn.
Hint 1: Note that the ALU does not perform bit
shifting (ash, lsh, or rot),
but a shifted output is one of the possible values
to WIn. The easiest way is to construct a dedicated
subcircuit Logic Operations that takes AOut
and Imm5 to perform the different shift/rotate
operations. You will then need to route this subcircuit's output
back to the main circuit.
Hint 2: Use your spreadsheet from Homework 4.
Part 3: Add Branch Control Logic
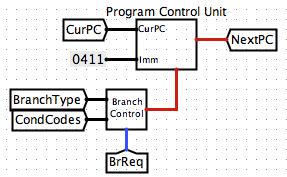
In the third homework, you created the subcircuit PC Control
Unit and added it to Main. Recall that PCSel was
used to select between PC+1 or the constant 411. In this section,
you will build the full PC Control Unit.
-
Study the ULNAv2-A RTN. Create a new
signal
BranchType, a multi-bit value that encodes the various branch types (unconditional, conditional branch if less than, conditional branch if not equal, etc.) -
Create a new subcircuit, Branch Control Unit. This
circuit determines if a branch should be taken or not. It takes
3 inputs:
-
Branch Requested(1 bit) - 1 if a branch is requested, 0 for non-branching instructions.
-
Condition Codes(4 bits) - Current set of condition codes, from the Condition Codes register.
-
Branch Type(multiple bits) - Encoding of branch type, from previous step.
-
-
Integrate your Branch Control Unit into the PC Control Unit,
replacing the old
PCSelcontrol signal with the output from Branch Control Unit. Re-test your main circuit by manually poking the clock line. Each clock cycle should still increment the program counter by 1. -
Remove the constant
411, replacing it with the various possible destinations for a branch instructions. For example, the unconditional branch instructionbjumps toCurPC + SignExtend(Imm11).
Part 4: Finish ULNAv2-A Processor
This part is by far the most difficult part of the entire semester. You are to complete building the Instruction Decoder from the fourth homework and tie everything together. You will need to do the following:
-
Add control signals that
set
ALUASrc,ALUBsrc, andMemToReg. -
Decode
Imm5,Imm8, andImm11. Route them to the B Bus and other places throughout. - Generate control signals for your Branch Control Unit.
Hint 3: Some control signals will be obvious. For
example,
MemRead is true when executing ldw
or ldwi instructions. Those two instruction's numbers
intentionally have a very similar bit pattern.
Hint 4: Build yourself Karnaugh maps for the more complex control signals. Use your spreadsheet to analyze all of the instructions.
Test your decoder thus far with adder.S
and bosrt.S from Homework 4. Load the assembled image into
Instruction Memory, then poke the clock several times. Check that
all signals are generated correctly, and that the program goes into
an infinite loop when it executes the halt
instruction. Compare your circuit's state to what the emulator
reports.
Part 5: ULNAv2-A Floating Point Multiplication
Now that hopefully you have a functional ULNAv2-A processor, it is time to write the final assembly code. Take your unsigned multiplication code from HW4's multu16.S and copy it into indicated portion of proj2.S. Then write ULNAv2-A assembly that matches this C function:
/**
* Determine the sign when f1 is multiplied by f2. Both f1 and f2
* are half-precision floating point values.
*
* @param[in] f1 First half-precision floating point operand
* @param[in] f2 Second half-precision floating point operand
* @return 0 if the product would be positive, 0x8000 if negative
*/
extern uint16_t calc_sign(uint16_t f1, uint16_t f2);
Assemble the binary. Load your assembled image, then enable the clock. After the system halts, inspect your Data Memory. Compare the contents with the comments at the end of proj2.S with your Data Memory's contents. If you get the same results, you most likely will score very well for this project!
Finally, use the ULNAv2-A emulator to calculate how many cycles are needed to execute the program. Add a comment near the top of proj2.S with your observation.
Other Hints and Notes
- Ask plenty of questions on the Blackboard discussion board.
- At the top of your proj2.circ circuit, list any help you received as well as web pages you consulted. Please do not use any URL shorteners, such as goo.gl or TinyURL. Also, do not cite shared data services, such as Pastebin, Dropbox, or Google Drive.
- You are free to construct your circuit differently than the images above. Specifically, the diagrams above intentionally omitted some control signals.
Extra Credit
You may earn an additional 10% credit for this assignment by integrating a hardware multiplication unit. Examine the Logisim file uint16.circ. This circuit implements a shift-add multiplier (Version 3). Using this circuit as a basis (or build your own, if you feel so inclined), add these two new operations to your ULNAv2-A processor:
| Instruction | Instruction Class | Instruction Number | RTN (both of these also do PC ← PC + 1) |
|---|---|---|---|
| mul | A | 6 | Product ← R[A] UMUL R[B]; R[W] ← Product[15:0] |
| movup | C | 17 | R[W] ← LogicalShiftRight(Product[31:16], 16) |
mul, takes two registers and
performs 16-bit unsigned multiplication. The lower 16 bits of the
resulting product are written to a third register. The second
instruction, movup, writes the upper 16 bits of the
most recent mul instruction to a
register. (It moves the upper half of
the product to a register.) If no mul has yet
executed, movup writes 0 to the target register.
You are to add a multiplication unit to your circuit, then update your datapath to handle these two new instructions. Note that the given uint16_mult.circ implements multiplication as a multi-cycle instruction. That means it takes several cycles to perform the multiplication; while it is busy the CPU should not attempt to execute any other instruction.
Finally, update your proj2.S. Comment out your original
software-based multiplication algorithm uint16_mult,
replacing it with mul and movup. Test the updated
assembly code in both the ULNAv2-A emulator and with your Logisim
circuit. Note the significant decrease in execution time. Near the
top of the file in a comment, list both CPU cycle counts for both
the original software-only uint16_mult and the
hardware-accelerated version.
If you choose to perform this extra credit, put a comment near the top of your proj2.S, alerting the grader.